So here you go. My first stable datalogger build* for a Tinyduino stack consisting of: a processor board, a BMA250 accelerometer sheild, the microSD adapter, and a protoboard, jumpered to a chronodot RTC. The whole thing runs ‘unregulated’ off of 3 AA batteries, so I keep an eye on the bandgap voltage to (hopefully) stop data writes to the SD card when the battery voltage gets too low. But this part has not been tested yet, so don’t trust your life, or data for your thesis, to that kludge. Build yourself a real voltage divider!
//note: angle brackets which should be around library names are missing here due to formatting weirdness in WordPress
#include SD.h
#include Wire.h
#include SPI.h // not used here, but needed to prevent a RTClib compile error
#include avr/sleep.h
#include RTClib.h
#ifndef cbi //defs for stopping the ADC during sleep mode
#define cbi(sfr, bit) (_SFR_BYTE(sfr) &= ~_BV(bit))
#endif
#ifndef sbi
#define sbi(sfr, bit) (_SFR_BYTE(sfr) |= _BV(bit))
#endif
#define DS3231_I2C_ADDRESS 104 //for the RTC temp reading function
#define BMA250 0x18
#define BW 0x08 //7.81Hz bandwith
#define GSEL 0x03 // set range 0x03 – 2g, 0x05 – 4, 0x08 – 8g, 0x0C – 16g
//#define DELAY 10000 is this line an orphan?
RTC_DS3231 RTC;
byte Alarmhour = 1;
byte Alarmminute = 1;
byte dummyRegister;
int INTERRUPT_PIN = 2;
volatile int state = LOW;
volatile boolean clockInterrupt = false;
int SampleInterval = 1;
// power-down time in minutes before interupt triggers next sample
byte tMSB, tLSB; //for the RTC temp reading function
float temp3231;
const int chipSelect = 10; //sd card chip select
uint8_t dataArray[16];
//variables for accellerometer reading
int8_t BMAtemp;
float BMAtempfloat;
int x,y,z;
String BMAdata; //for passing back data from bma read function
char TimeStampbuffer[ ]= “0000/00/00,00:00:00, “;
int ledpin = 13; //led indicator pin
void setup () {
pinMode(INTERRUPT_PIN, INPUT);
digitalWrite(INTERRUPT_PIN, HIGH);//pull up the interrupt pin
pinMode(13, OUTPUT); // initialize the LED pin as an output.
digitalWrite(13, HIGH); // turn the LED on to warn against SD card removal
Serial.begin(9600);
Wire.begin();
RTC.begin();
//RTC.adjust(DateTime(__DATE__, __TIME__));
//the above line set the time with code compile time – you only run this line ONCE!
clearClockTrigger(); //stops RTC from holding the interrupt low if system reset
// time for next alarm
DateTime now = RTC.now();
Alarmhour = now.hour();
Alarmminute = now.minute()+ SampleInterval ;
if (Alarmminute > 59) { //error catch – if Alarmminute=60 the interrupt never triggers due to rollover
Alarmminute = 0; Alarmhour = Alarmhour+1; if (Alarmhour > 23) {Alarmhour =0;}
}
initializeBMA(); //initialize the accelerometer
//get the SD card ready
pinMode(chipSelect, OUTPUT); //make sure that the default chip select pin is set to output, even if you don’t use it
Serial.print(“Initializing SD card…”);
if (!SD.begin(chipSelect)) { // see if the card is present and can be initialized:
Serial.println(“Card failed, or not present”); // don’t do anything more:
return;
}
Serial.println(“card initialized.”);
File dataFile = SD.open(“datalog.txt”, FILE_WRITE); //PRINT THE DATA FILE HEADER
if (dataFile) { // if the file is available, write to it:
dataFile.println(“YYYY/MM/DD, HH:MM:SS, Vcc(mV), X = , Y = , Z = , BMATemp (C) , RTC temp (C)”);
dataFile.close();
}
else { //if the file isn’t open, pop up an error:
Serial.println(“Error opening datalog.txt file!”);
}
}
void loop () {
if (clockInterrupt) {
clearClockTrigger();
}
//read in our data
BMAdata = String(“”); //clear out the datastring
read3AxisAcceleration(); //loads up the dataString
DateTime now = RTC.now(); // Read the time and date from the RTC
sprintf(TimeStampbuffer, “%04d/%02d/%02d,%02d:%02d:%02d,”, now.year(), now.month(), now.day(), now.hour(), now.minute(), now.second());
Serial.println(“Timestamp Y/M/D, HH:MM:SS, Vcc = , X = , Y = , Z = , BMATemp (C) , RTC temp (C)”);
Serial.print(TimeStampbuffer); Serial.print(readVcc()); Serial.print(“,”);
Serial.print(BMAdata); Serial.print(“,”); Serial.println(get3231Temp());
//write data to the SD card
// note that only one file can be open at a time,so you have to close this one before opening another.
File dataFile = SD.open(“datalog.txt”, FILE_WRITE);
if (dataFile) { // if the file is available, write to it:
dataFile.print(TimeStampbuffer);dataFile.print(readVcc()); dataFile.print(“,”);
dataFile.print(BMAdata); dataFile.print(“,”); dataFile.println(get3231Temp());
dataFile.close();
}
else { //if the file isn’t open, pop up an error:
Serial.println(“Error opening datalog.txt file”);
}
// setNextAlarmTime();
Alarmhour = now.hour(); Alarmminute = now.minute()+SampleInterval;
if (Alarmminute > 59) { //error catch – if alarmminute=60 the interrupt never triggers due to rollover!
Alarmminute =0; Alarmhour = Alarmhour+1; if (Alarmhour > 23) {Alarmhour =0;}
}
RTC.setAlarm1Simple(Alarmhour, Alarmminute);
RTC.turnOnAlarm(1);
Serial.print(“Alarm Enabled at: “);
Serial.print(now.hour(), DEC); Serial.print(‘:’); Serial.println(now.minute(), DEC);
Serial.print(“Going to Sleep for “); Serial.print(SampleInterval);Serial.println(” minutes.”);
delay(100);
//a delay long enough to boot out the serial coms before sleeping.
sleepNow();
//Serial.println(“Alarm 1 has been Triggered!”);
}
void sleepNow() {
digitalWrite(13, LOW);
cbi(ADCSRA,ADEN); // Switch ADC OFF
set_sleep_mode(SLEEP_MODE_PWR_DOWN);
sleep_enable();
attachInterrupt(0,clockTrigger, LOW);
sleep_mode();
//HERE AFTER WAKING UP
sleep_disable();
detachInterrupt(0);
sbi(ADCSRA,ADEN); // Switch ADC converter ON
pinMode(13, OUTPUT); digitalWrite(13, HIGH);
// turn the LED on to warn against SD card removal
// But I have some conflict between the SD chip select line, and the led – so the darned thing never lit!
}
void clockTrigger() {
clockInterrupt = true; //do something quick, flip a flag, and handle in loop();
}
void clearClockTrigger()
{
Wire.beginTransmission(0x68); //Tell devices on the bus we are talking to the DS3231
Wire.write(0x0F); //Tell the device which address we want to read or write
Wire.endTransmission(); //Before you can write to and clear the alarm flag you have to read the flag first!
Wire.requestFrom(0x68,1); // Read one byte
dummyRegister=Wire.read(); // In this example we are not interest in actually using the bye
Wire.beginTransmission(0x68); //Tell devices on the bus we are talking to the DS3231
Wire.write(0x0F); //Tell the device which address we want to read or write
Wire.write(0b00000000); //Write the byte. The last 0 bit resets Alarm 1
Wire.endTransmission();
clockInterrupt=false; //Finally clear the flag we used to indicate the trigger occurred
}
// could also use RTC.getTemperature() from the library here as in:
//RTC.convertTemperature(); //convert current temperature into registers
//Serial.print(RTC.getTemperature()); //read registers and display the temperature
float get3231Temp()
{
//temp registers (11h-12h) get updated automatically every 64s
Wire.beginTransmission(DS3231_I2C_ADDRESS);
Wire.write(0x11);
Wire.endTransmission();
Wire.requestFrom(DS3231_I2C_ADDRESS, 2);
if(Wire.available()) {
tMSB = Wire.read(); //2’s complement int portion
tLSB = Wire.read(); //fraction portion
temp3231 = ((((short)tMSB << 8 | (short)tLSB) >> 6) / 4.0); // Allows for readings below freezing – Thanks to Coding Badly
//temp3231 = (temp3231 * 1.8 + 32.0); // Convert Celcius to Fahrenheit
return temp3231;
}
else {
temp3231 = 255.0; //Use a value of 255 to error flag that we did not get temp data from the ds3231
}
return temp3231;
}
byte read3AxisAcceleration()
{
Wire.beginTransmission(BMA250);
Wire.write(0x02);
Wire.endTransmission();
Wire.requestFrom(BMA250,7);
for(int i = 0; i < 7;i++)
{
dataArray[i] = Wire.read();
}
if(!bitRead(dataArray[0],0)){return(0);}
BMAtemp = dataArray[6];
x = dataArray[1] << 8; x |= dataArray[0]; x >>= 6;
y = dataArray[3] << 8; y |= dataArray[2]; y >>= 6;
z = dataArray[5] << 8; z |= dataArray[4]; z >>= 6;
BMAdata += String(x);
BMAdata += “,”;
BMAdata += String(y);
BMAdata += “,”;
BMAdata += String(z);
BMAdata += “,”;
BMAtempfloat = (BMAtemp*0.5)+24.0;
// add digits of BMAtempfloat value to datastring
BMAdata += ((int)BMAtempfloat);
BMAdata += “.”;
int temp = (BMAtempfloat – (int)BMAtempfloat) * 100;
BMAdata += (abs(temp));
//the following 2 lines also to convert float to string
//dtostrf(floatVariable2convert, minStringWidthIncDecimalPoint, numVarsAfterDecimal, charBuffer);
//for example: dtostrf(BMAtempfloat, 5, 2, dtostrfbuffer); dataString += dtostrfbuffer;
}
byte initializeBMA()
{
Wire.beginTransmission(BMA250);
Wire.write(0x0F); //set g
Wire.write(GSEL);
Wire.endTransmission();
Wire.beginTransmission(BMA250);
Wire.write(0x10); //set bandwith
Wire.write(BW);
Wire.endTransmission();
return(0);
}
long readVcc() { //trick to read the Vin using internal 1.1 v as a refrence
long result;
// Read 1.1V reference against AVcc
ADMUX = _BV(REFS0) | _BV(MUX3) | _BV(MUX2) | _BV(MUX1);
delay(2); // Wait for Vref to settle
ADCSRA |= _BV(ADSC); // Convert
while (bit_is_set(ADCSRA,ADSC));
result = ADCL;
result |= ADCH<<8;
result = 1126400L / result; // Back-calculate AVcc in mV
return result;
}



 After sleeping on it, I realized that we had actually observed one other problem with the units the day before: Although the water flow was moving the housings, the videos showed that they did not quite lean at the same angle as the supporting pole. The second pivot point under the float was allowing the unit to try to right itself, reducing the tilt angle that the accelerometer would read. So the next day, while Trish was off diving with one of her students, I attached some foam floats to the support rods, which now had plenty of holes to vent any trapped bubbles, and I refashioned the float end of the support rods into a fixed ‘T’ junction.
After sleeping on it, I realized that we had actually observed one other problem with the units the day before: Although the water flow was moving the housings, the videos showed that they did not quite lean at the same angle as the supporting pole. The second pivot point under the float was allowing the unit to try to right itself, reducing the tilt angle that the accelerometer would read. So the next day, while Trish was off diving with one of her students, I attached some foam floats to the support rods, which now had plenty of holes to vent any trapped bubbles, and I refashioned the float end of the support rods into a fixed ‘T’ junction.
 primary light. Which is pretty much on par for the beginning of fieldwork. We brought the dead light in for repair at the Dreams Tulum Dive Shop, where the owner (who makes dive lights and turns professional housings on his lathe) kindly offered to test my humble DIY housings in a pressure chamber he had fashioned from a decapitated scuba tank. I was fairly confident about the o-ring design, but I still had lingering doubts about the one with the rubber end cap, so I jumped at the chance. While the unit was still dry, I stuffed it full of toilet paper to act as an indicator for any water that might leak in. Then I put in the calibration weight, and he lowered it into the chamber. He pressurized it to about 100 feet and there was an a loud “clunk” sound at the start of the procedure; I feared the worst.
primary light. Which is pretty much on par for the beginning of fieldwork. We brought the dead light in for repair at the Dreams Tulum Dive Shop, where the owner (who makes dive lights and turns professional housings on his lathe) kindly offered to test my humble DIY housings in a pressure chamber he had fashioned from a decapitated scuba tank. I was fairly confident about the o-ring design, but I still had lingering doubts about the one with the rubber end cap, so I jumped at the chance. While the unit was still dry, I stuffed it full of toilet paper to act as an indicator for any water that might leak in. Then I put in the calibration weight, and he lowered it into the chamber. He pressurized it to about 100 feet and there was an a loud “clunk” sound at the start of the procedure; I feared the worst.
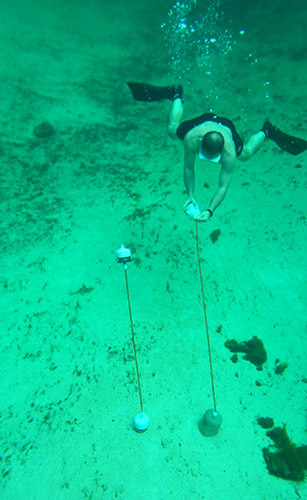
 Trish and I spent the next little while swimming around the units, trying to see them from all angles, while the curious onlookers tried to figure out what the heck we were doing. But as we continued discussing the floats, working on where to move them next, a problem was slowly developing. Over the next 15-20 minutes, the o-ring housing, slowly, inexorably, sank to the bottom. The only logical conclusion I could think of was that the seals had failed, and that the Mark II, which I had so carefully assembled, was a failure.
Trish and I spent the next little while swimming around the units, trying to see them from all angles, while the curious onlookers tried to figure out what the heck we were doing. But as we continued discussing the floats, working on where to move them next, a problem was slowly developing. Over the next 15-20 minutes, the o-ring housing, slowly, inexorably, sank to the bottom. The only logical conclusion I could think of was that the seals had failed, and that the Mark II, which I had so carefully assembled, was a failure.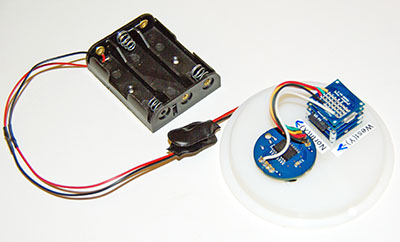



 I had used some
I had used some  cable ties through pvc plugs, and suspending them under the pipe clamp. This worked but it only heightened my concern about the nature of the seal on these puppies. You see traditional O-ring designs actually work better on deep dives, because the added water pressure compresses the o-rings more tightly. This new design was super simple to build but it was also critically dependent on not one, but two pipe clamps made of metal, as I had to balance the mass of the clamp screw. Even with marine grade stainless, I had my doubts about the longevity of that seal. Nonetheless, I pressed on, and thought about a scaffold for the batteries and sensor package. A bit of
cable ties through pvc plugs, and suspending them under the pipe clamp. This worked but it only heightened my concern about the nature of the seal on these puppies. You see traditional O-ring designs actually work better on deep dives, because the added water pressure compresses the o-rings more tightly. This new design was super simple to build but it was also critically dependent on not one, but two pipe clamps made of metal, as I had to balance the mass of the clamp screw. Even with marine grade stainless, I had my doubts about the longevity of that seal. Nonetheless, I pressed on, and thought about a scaffold for the batteries and sensor package. A bit of  ply, some hard foam insulation, and a touch of gorilla glue (an adhesive on my top five list of bodging materials) produced a battery compartment and electronics platform under 25 grams. I added a ballast mass post with an old Ikea door pull, and put one of my new Tinyduino stacks into place. The hold down screws they came with were not long enough to penetrate that wood, so I had to fashion a U bend out of brass wire to affix the electronics.
ply, some hard foam insulation, and a touch of gorilla glue (an adhesive on my top five list of bodging materials) produced a battery compartment and electronics platform under 25 grams. I added a ballast mass post with an old Ikea door pull, and put one of my new Tinyduino stacks into place. The hold down screws they came with were not long enough to penetrate that wood, so I had to fashion a U bend out of brass wire to affix the electronics.
