We just returned from presenting the Cave Pearls at the GSA in Vancouver!

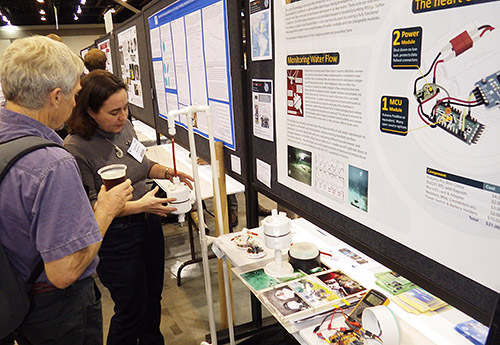
Having a que form before you finish setting up the poster in the morning is always a good sign…
Since we left most of the operating data loggers we had in Mexico on our last trip, I had to scramble to build a few more before the conference. I also spent an inordinate amount of time making the poster look pretty, as this was our first “formal” pitch of the Cave Pearl system to the academic world. (and that is my day job right?) While all of this was old hat for a career academic like my wife, I admit I was a bit nervous, and somewhat uncertain if there would be any interest at all. A few researchers had already expressed to me the opinion that any time they had to spend building sensors or equipment represented an unacceptable opportunity cost. (ie: that time could be better spent on grant writing to buy commercial equipment) and some of the more technically inclined people simply dismissed AVR based Arduinos as a second-best option, suitable only for hobbyists.
But overall, the presentation was very well received, and we had a constant stream of interested people that kept both of us busy talking all day long.
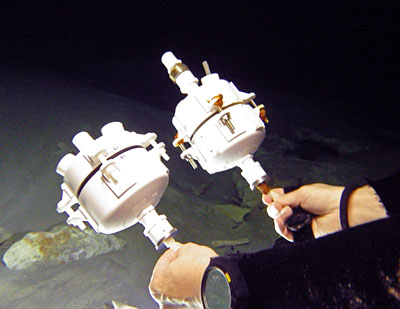
Trish describing the flow sensor deployment dives.
I created a display stand for the flow sensors, to explain the principle of the hydro-metric pendulum, and we had a “live” drip sensor operating under a suspended funnel of water. It’s blinking led drew some people in and I had several open units to put into their hands so that they could see how simple the physical build was. I suspect that a few research groups will now be adopting my data logger platform, and I gave away a couple of drip sensor units to help some of them get started. It made my maker-heart happy to find out that several other groups were already investigating various Arduino mcu boards, and they were impressed to see my loggers sleeping below 0.25 mA with the sensors running to provide interrupts. (there was no Pololu power switch on that one) Many of them are at about the same stage that I was at a year ago, so hopefully the code I have developed will help to advance their projects more rapidly.
So now we have several new groups to collaborate with, which will be handy when it comes time to co-deploy my DIY sensors with some commercial equipment for calibration. Of course, now I need to get a technical paper out the door…so those guys have something other than this humble blog to cite. 🙂