

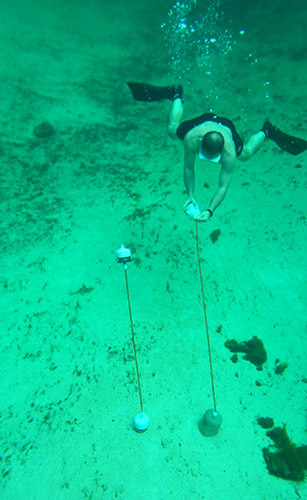
About to surface with the beta loggers.
All the usual grumbles of getting our kit out of storage and ready to roll delayed the Beta unit retrieval till late afternoon, and I was really chomping on the bit by that point. It was a good haul against the current out to the deployment site, but once there I was very happy to see our little loggers swaying gracefully. After a good visual inspection, to examine the anchors and brush away the sizable clumps of rusty brown goo that had grown on the exposed metal, we popped them into a mesh bag and headed back to the surface. With my ears above water, I dared a few little shakes to check…had they leaked….?

Breaking the seal.
We cradled the loggers all the way back to Tulum while we waited for them to dry out. After a quick rinse, we stowed the dive gear and then set to work on the pearls. Both of them opened with a satisfying “ssshhhick” indicating that the seals were indeed good. (they were compressed a bit at depth) I have to admit I have been working on the new builds so intensively, I laughed to see the tape that was holding these guys together, and the leggo I had solvent welded into the battery compartments. I checked the hour: it was 7:45pm…perfect time to cut the power, as the units had been left on a 1/2 hour sampling schedule. Once the power was disconnected, I could breathe a sigh of relief, as we were then safe from any further calamities that might hurt the precious SD cards. But we did not have a reader with us, and as usual, Trish had filled the evenings schedule with meetings with some of the other researchers in town. In the end it was 11:00 pm before we could look at the SD cards and know if our little experiment was truly a success….
And it was! In fact both units were collecting readings right up to the point where I disconnected the battery. Woot! Trish went to work, and I just sat back, impressed by the super sonic “squiggle wrangling”.
“Temps…no trending..but nothing useful there… offsets…”, she was talking to the screen more than to me. No surprise on the temperature data as the readings were from the RTC, completely trapped inside thermal mass of the housing.
“Can you bring up the two voltage curves?” I asked, “I want to know how we did on power consumption.”
“Right.”…clickety, clickety, click… “How’s this?”
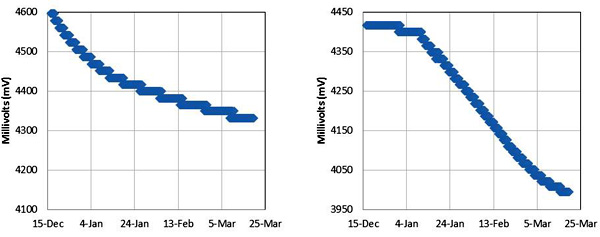
Left: Unit 1 Right: Unit 2 (w rubber bottom)
Quite a difference, but both units had run in the > 4 volt range for three months. So we had been far too conservative with the 30 minute sampling routine, although I had no way to know that when they went in last year. Pretty much identical components in the build, so for now I am attributing the different power curves to the mix of batteries that were used.
“Z offsets….X and Y as well….” clickity, click… “…easy to fix… and we can do a quick running average for that noise…”
“No, don’t fix it!” I injected, “I want to see the raw data, side by side.”
Trish’s hands paused, and she dropped out of the excel trance long enough to give me a puzzled look: “Why would you want that?”
I explained that while she was rapidly turning the numbers into something relevant to the actual water flow, I (as the builder) wanted to know how the two units compared to each other, as basic machines…
“Hmmm, Ok”….

Left: Unit1 Right:Unit2 Raw z Axis, sub-sample
The different amplitudes were not a surprise, as our buoyancy control was just best guess approximation. But in theory, the accelerometers were identical, so the offsets were kind of interesting. Ah well, it will be a while yet before I am at the point of calibrating these things…

I am amazed that we don’t get more grief from airport security when we travel with this kit.
Trish was still talking to the screen “mmmm…some finer structures here…”, and clicking away, but it was nearing 1:30 am at this point, and I was starting to fade. I uploaded all the data to a Google doc, and suggested that we call it a day.
I knew what I still had ahead of me ->
I hope that Turtle Bay Cafe doesn’t mind if I take up residency for a few days, while I work on the next generation:
“Mass caffecito porfa…”



 Trish and I spent the next little while swimming around the units, trying to see them from all angles, while the curious onlookers tried to figure out what the heck we were doing. But as we continued discussing the floats, working on where to move them next, a problem was slowly developing. Over the next 15-20 minutes, the o-ring housing, slowly, inexorably, sank to the bottom. The only logical conclusion I could think of was that the seals had failed, and that the Mark II, which I had so carefully assembled, was a failure.
Trish and I spent the next little while swimming around the units, trying to see them from all angles, while the curious onlookers tried to figure out what the heck we were doing. But as we continued discussing the floats, working on where to move them next, a problem was slowly developing. Over the next 15-20 minutes, the o-ring housing, slowly, inexorably, sank to the bottom. The only logical conclusion I could think of was that the seals had failed, and that the Mark II, which I had so carefully assembled, was a failure.