1st & 2nd generation loggers were accumulating rapidly…
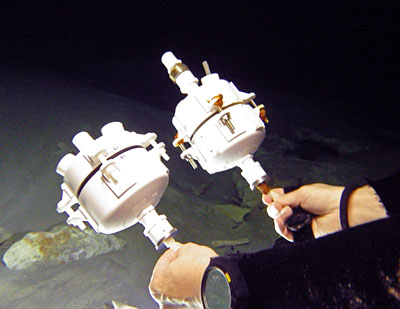
Each of the next few days started with a dive to replace old units that had been installed in deeper passages along System Ox Bel Ha, with the new generation of flow sensors. To avoid the ballast problems we had on the last round of salt water deployments, we decided to adjust the buoyancy of each flow sensor in-situ, while it was hanging from the support rods. The connectors themselves contributed varying amounts of negative buoyancy depending on their distance from the pivot joint, and some of the deep sites needed up to four rods (~2m) to get the flow meter into the right location in the water column. This required more time at depth than I would have liked the first time we tried it, but over the next few deployments we got reasonably good at weighting the units so that they were sensitive to the gentlest water movements. I need to put some more thought into making this procedure easier to do.
And we knew how important this fine-tuning was in the deep saline zone because each unit we downloaded told us that the August flow sensors were far heavier than they should have been. Ten grams of negative buoyancy is fine in a coastal discharge that races along at 15 cm/second, but when the fastest flows are below 1 cm/s, the pearls needed to be as light as a feather. Semi-diurnal tides that jumped off the screen when we plotted the data from high flow sites, barely rose above the ADC noise in systems like Maya Blue and Jailhouse. Of course there were more epoxy failures, and we continued to see units brought down by fake SD cards. The combination of these factors meant that we lost most the data from the last generation of flow sensors. I will never trust retail packaging for electronic components again.

Each rebuild needed a few days of testing to catch code bugs…
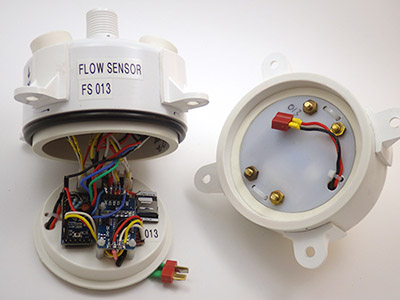
And for the first time, we had so many sensors returning from deployments that refurbishing & reloading them was turning into a major part of the trip logistics. That sounds pretty obvious in hindsight, but I was so used to having the opposite problem: where we concentrated on squeezing every possible dive out of the “precious” YSI Sonde or Hydrolab, that having to triage old data loggers had never happened to us before. I started migrating parts from the younger units with failed epoxy, into the older generation builds with sound housings. Then every logger had it’s SD card replaced with ‘good sleepers’, and I tested them over again… just to be sure. I completely rebuilt two of the Beta generation units for CEA’s open ocean deployement, and finally got around to putting the bma250’s they carried into a low current sleep mode. I even melted grooves into the housings so that Marco could check the sensor orientation “by feel”, after they turned into floating algae farms.

I hope it is sealed well enough for a surface deployment…
Things proceeded well: All clocks on UTC? Check. Replace old style battery connectors? Check. Good data saves from test runs? Check. Every few hours saw another unit up and running with reasonable sleep currents. But the failed pressure sensor posed a bit of a problem. Bad epoxy or not, we needed two pressure units running so we could subtract the barometric from the combined signal that the under water units were reading. In the end I decided to re-submerge the older 2bar unit I built back in March, despite the fact that it had already done a long stint underwater, and I would leave the newer 5-bar pressure unit on the surface after sealing the hole with some glue from the local hardware store.
I was so zoned getting all these little Frankensteins going that for a while I lost track of the days. I think it rained…or maybe it was sunny…because I was in Mexico…right? Fortunately while I was going non-verbal, Ben Schwartz and his crew of avid cavers arrived in Akumal. Being somewhat occupied, I hardly noticed the time Trish spent talking to them about to the region, and it’s wonderful cave systems. They got the two-penny tour of our humble field station and endured my Cave Pearl “elevator speech”, which was still embedded in my brain from the GSA. Good thing too, as scripting & sleep deprivation had crowded out most of my other brain functions by that point.
And at night our room lit up like a Christmas tree every fifteen minutes, because all the little LED heartbeats were blinking in rough unison as loggers ran their overnight tests…