
I suggested in the last post that a new build usually comes together on the third iteration, so I though I would post a few photos of the current drip sensor, to show how much they changed in that short series:

Alpha, Beta & Gamma builds of the Cave Pearl Drip Sensor
That Alpha would only detect drops in the very center of the housing, and often registered double hits because of the splash back from the complex surface topography, which also caused a buildup of water on the surface, further interfering with the signal. So I removed the pressure and temperature sensor wells from the Beta, and used a heat gun to bow the surface and shed water. I hand sanded the pvc to make the strike surface thinner and more responsive, which increased the “reliable” sweet spot to the diameter of the circle you see on drawn there. This worked well, but as you might imagine removing that hour long fabrication step rose to the top of the priority list (if necessity is the mother of invention, laziness is surely the father…) I also did not want to penetrate the housing for those standoffs if I could avoid it because this device has to maintain integrity with constant water impact at exactly that spot.

Plastic-weld bonds the sensor, preserving the integrity of the housing
My solution to both problems was to solvent weld a four inch knock out cap to the top of the hard pvc shell. The green color you see there is ABS to PVC transition cement, that I learned about back at the beginning of the project when I was mangling Leggo bricks for internal scaffolding. The ABS is translucent, so the LED no longer needs a portal of clear epoxy because the light passes right through. The knockout is thin and stiff, which eliminates all that sanding and improves the response of the accelerometers so much that now the device even responds to loud noises, and almost the entire surface sensitive to the smallest drip. As a result I now have to tweak the settings to reduce the sensitivity so we don’t get too many false positives. But on the third build of a new sensor, that’s the kind of problem you want to have. I though the flat surface might resurrect the water pooling problem we had on the Alpha, but in the end it just ended up being a lesson in how I still miss things that are really darned obvious, because simply setting the drip sensor up with a slight tilt will shed the water without affecting the operation at all. (I am just glad I realized this before some three year old came along and pointed it out to me…)

Much easier to solder those jumpers now.
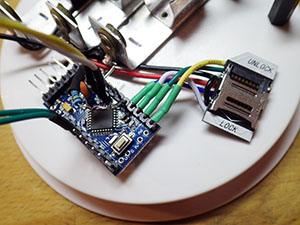
The trickiest part of the build is routing the wires to reduce strain. Thin silicone 26awg wire helps quite a bit there.
There have been a few improvements to the logging platform as well. I found these really inexpensive raspberry pi SD card adapters that are mounted on their own pcb, which neatly solves the melting problem that the cheap plastic adapters give you if you linger too long with your soldering iron.
 So this is the new baby, and I am now running burn tests on loggers using a few different clone boards, including a Rocket Scream Mini Ultra, as they have some very interesting power saving features that might significantly increase the operating time, while keeping the overall simplicity of the three component design. I expect a few more issues will arise in testing, so I will hold off posting the code to Github, till I am sure that they are behaving properly. I am still a bit stunned that these drip sensors came together so quickly, but perhaps the last six months of work on the flow meters had something to do with that. 🙂
So this is the new baby, and I am now running burn tests on loggers using a few different clone boards, including a Rocket Scream Mini Ultra, as they have some very interesting power saving features that might significantly increase the operating time, while keeping the overall simplicity of the three component design. I expect a few more issues will arise in testing, so I will hold off posting the code to Github, till I am sure that they are behaving properly. I am still a bit stunned that these drip sensors came together so quickly, but perhaps the last six months of work on the flow meters had something to do with that. 🙂
<— Click here to continue reading the story—> .
Addendum
Adafruit just posted a video from the National Science Foundation showing how water droplets move on various hydrophobic surfaces. Way cool…
Addendum 2014-12-11:
We deployed our first batch of these drip sensors in August, and when we went back to get them in December, we were delighted to find that the first real world run was a resounding success.
